The Research problem
Cardiovascular disease remains a leading cause of mortality worldwide, particularly amongst the elderly. Navigating catheters through the intricate cardiovascular system demands exceptional skill, expertise, and a deep understanding of physiology.
This project seeks to advance the modelling and control of soft, magnetically-controlled tentacle robots for minimally-invasive cardiovascular interventions. The key challenge lies in the complexity of continuum structures, which are highly flexible and deformable—such as the tentacle-like robots we aim to develop.
From a surgical standpoint, existing technologies for catheter-based interventions rely heavily on manual operation and visual feedback. This project will address these limitations by advancing state estimation and navigation methods in environments where traditional imaging is insufficient. Developing methods that allow accurate navigation and manipulation in such environments will push the boundaries of what is possible in minimally-invasive cardiac surgery.
Research Design
Key activities will include developing a detailed process map for the medical procedures leading up to and including diagnosis, surgical intervention, and recovery, with a particular focus on the surgical aspects of the intervention. We will identify the main pain points and challenges surgeons face during these procedures, as well as patient requirements and outcomes. From this, we will develop an ideal future scenario where advanced surgical robotics play a pivotal role.
In parallel, each institution will focus on their respective areas of expertise:
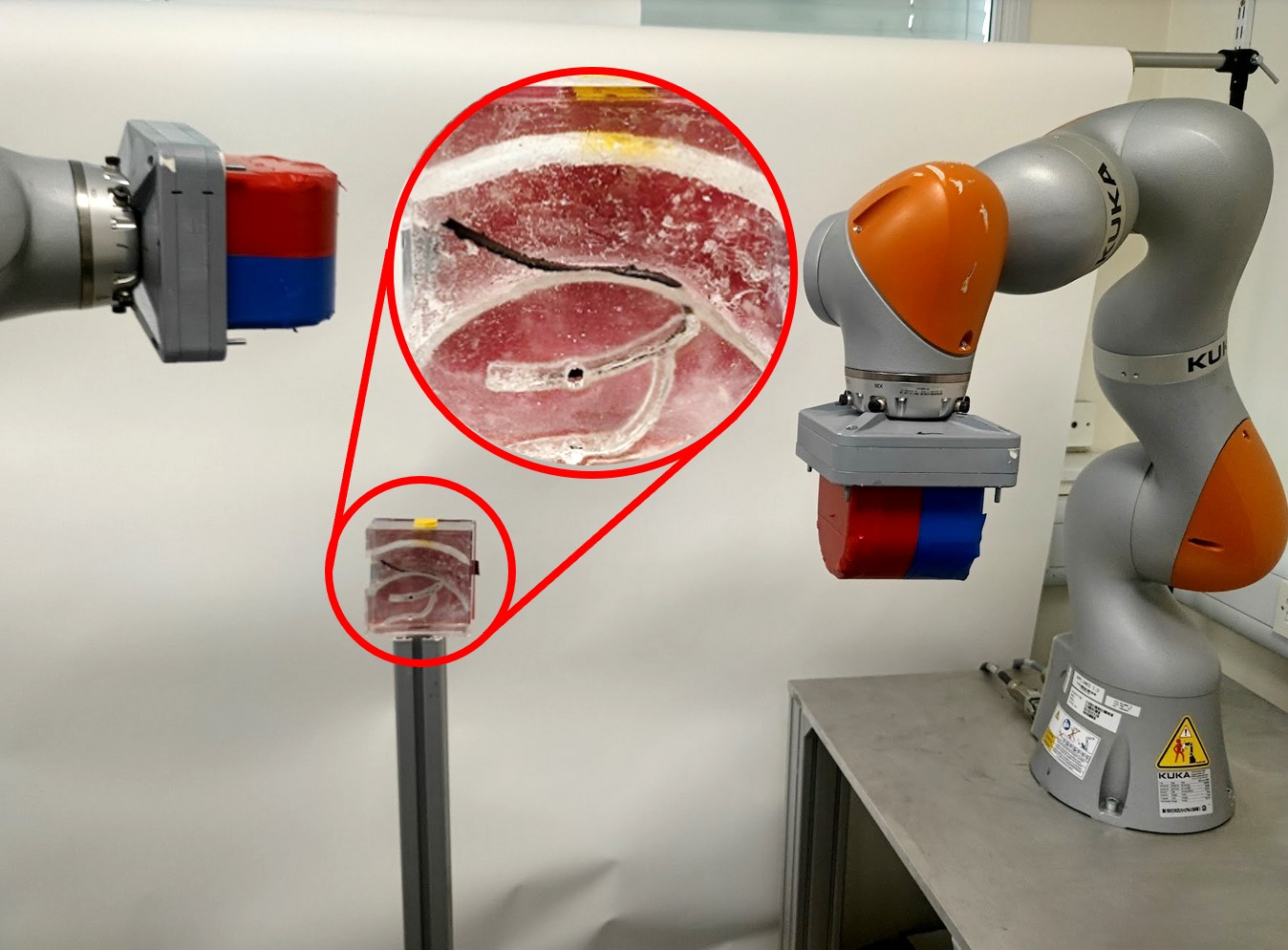
- STORM Lab (Leeds): Continue the development of the magnetic tentacle robots, focusing on the modeling, control, and fabrication aspects. These developments will align with the specific needs of structural heart interventions.
- UTS RI (Sydney): Provide support through expertise in state estimation and localization, with particular attention to fiber bragg grating (FBG) sensors, which allow for shape measurement inside opaque environments like organs.
- CUHK (Hong Kong): Collaborate on image processing and 3D reconstruction techniques, offering critical consultancy advice and subject-matter expertise.
Project Objectives
By the end of this 12-month scoping study, we expect to have:
- Improved modelling and control of soft tentacle robots, specifically tailored to continuum structures.
- Developed initial problem statements and potential solutions for state estimation and navigation in opaque, unstructured environments like the human body.
- A basic demonstration of magnetic manipulation for structural heart intervention in synthetic organs, providing proof of concept for future development.
These advances will provide the groundwork for further research and larger collaborative projects, ultimately contributing to the development of safer, more effective robotic systems for minimally-invasive heart surgery